Robotika Mig-veldado ----Street Lamp Pole-velda solvo
Indekso
1. Informoj pri laboro
2. Robotika veldado Solvo Superrigardo
3. Robota veldado Solva Procezo
4. Robotika solvo Ekipaĵo-Agordo
5. Ĉefa Funkcio 6. Enkonduko de Ekipaĵoj
7. Instalado, Komisionado kaj Trejnado
8. Kontrolo kaj Akcepto
9. Mediaj Postuloj
10. Garantio kaj Postvenda servo
11. Livero Alkroĉita Dokumentado
Robota veldado Aplika Video
1, Informoj pri Laborpeco
-Veldado drato Diametro: Ф1.2mm
-Procezo de veldo: gasa ŝirmita veldado/Mig-veldado
-Solda kudro tipo: rektlinia tipo, Cirkla tipo
-Ŝirma gaso:99% CO2
-Operacia Metodo: mana ŝarĝo kaj malŝarĝo, robota aŭtomata veldado
-Fitting up Eraro:≤ 0.5mm
-Plato Purigado :metala brilo videblas en la veldo kajene de la gamo de duobla alteco de veldkudro ambaŭflanke
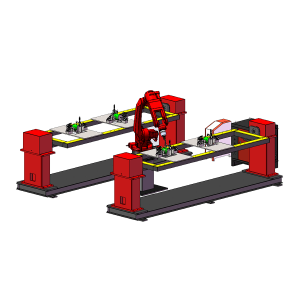
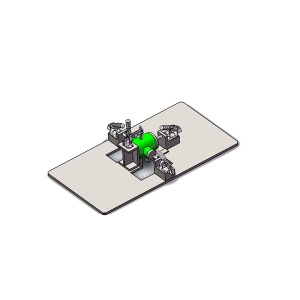
2, Robota velda solvo Superrigardo
Por plibonigi laboran efikecon, laŭ la reala situacio de laborpeco, Honyen-fabriko provizos aron de velda robota laborstacio, kiu povas esti anstataŭigita per malsamaj iloj por esti kongrua kun malsamaj produktoj.La laborstacio konsistas el robotmodelo: HY1006A-145 velda roboto, velda energifonto, speciala velda torĉo por roboto, elektra kontrolo Kabineto kaj butonoj, akvomalvarmiga malvarmigilo, duoblaj laborstaciaj poziciiloj, ilaj aparatoj, sekureca protekta barilo (laŭvola) kaj aliaj. partoj.
3,Mig Welding robota laborstacio Enkonduko de Aranĝo
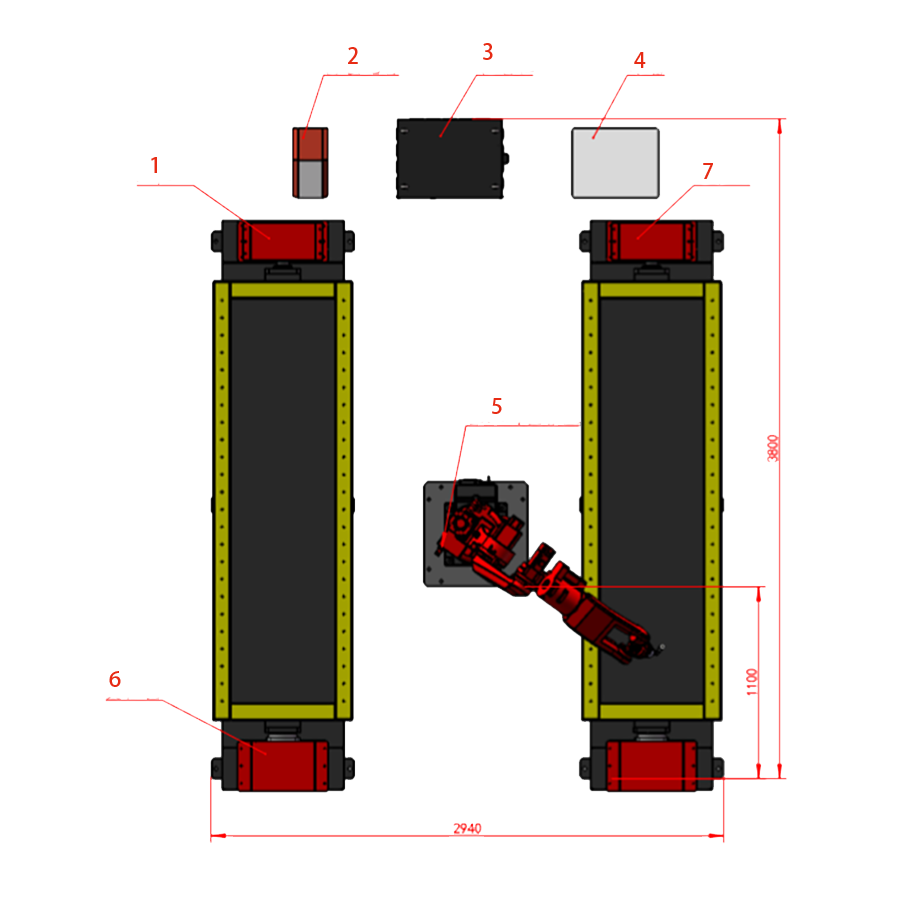
Hoyen robota arka velda laborstacio Aranĝo
1, Laborstacio 1
2, Soldado Potenca fonto
3, Robota regilo
4, Akvo malvarmiga chiller
5, Hoyen arko-veldado Roboto, HY1006A-145
6, Poziciisto
7, Laborstacio 2
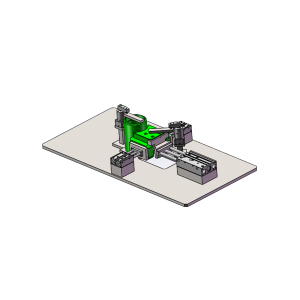
Elektraj polusaj partoj fiksaĵoj
Elektraj polusaj partoj fiksaĵoj 2
Robotaj veldaj solvoj Aranĝo 1
Elektraj Polusaj Partoj Fiksaĵoj 3
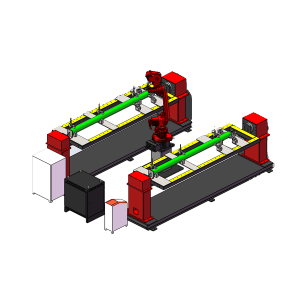
Robotaj veldaj solvoj Aranĝo 2
Robotaj veldaj solvoj Aranĝo 3
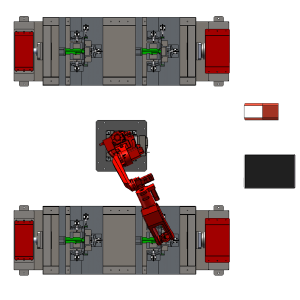
4. Robota veldado Solva Procezo I. Operatoro ŝarĝas laborpecon ĉe stacidomo 1, Post ŝarĝo kaj krampo ĝin.Operaciisto premas la butonon de komenco de rezervado de roboto 1, kaj roboto komencas aŭtomatan veldon;
II.Operaciisto iras al la stacio 2 por laborpeco ŝarĝo.Post ŝarĝo de laborpeco, Operaciisto premas robotan rezervan startbutonon 2 kaj atendas ke la roboto finas veldon;
III.Post kiam roboto finas veldi ĉe stacio 1, ĝi aŭtomate efektivigas la programon de stacio 2;
Ⅳ.Tiam Operatoro malŝarĝas Laborpecon ĉe la stacio 1 kaj ŝarĝas novan laborpecon;
V. ciklo en sinsekvo.
5. Robotika solvo Ekipaĵo-Agordo
| Ero | Modelo | Kvanto | Marko | Rimarkoj | ||
| 1 | 1.1 | Robotkorpo | HY1006A-145 | 1 Aro | Honyen | Inkluzive de robotkorpo, kontrola kabineto, instrua programisto |
| 1.2 | Ŝranko de roboto | 1 aro | ||||
| 1.3 | Veldada potenco Fonto | 1 Aro | Honyen | Megmeet-veldisto | ||
| 1.4 | akvocisterno | 1 Aro | Honyen | |||
| 1.5 | Akvomalvarmiga velda Torĉo | 1 Aro | Honyen | |||
| 2 | 1 Aksa poziciigilo | HY4030 | 2 Agordu | Honyen | 2.5m, 300kg ŝarĝo, 1.5KW taksita eligo potenco | |
| 3 | Elektra kontrolo-stacio | 2 Agordu | Honyen | |||
| 4 | Sistemdezajno, integriĝo kaj programado | 1 Aro | Honyen | |||
| 5 | Sekureca barilo | 1 Aro | Honyen | Laŭvola | ||
6. Ĉefa Funkcio Por certigi veldan kvaliton kaj efikecon, robota sistemo estas ekipita per perfekta memprotekta funkcio kaj arka velda datumbazo.La ĉefaj funkcioj estas kiel sekvas:
Rekomencu originan vojon: kiam ŝirmgasa fluo estas nenormala, velda drato konsumita kaj provizore ĉesigita dum veldado, la komando de "daŭrigi veldadon" povas esti rekte nomita post problemo-solvado, kaj roboto povas aŭtomate daŭrigi veldi de iu ajn pozicio al la suspendita pozicio.
Detekto kaj antaŭdiro de misfunkciado: post kiam alarmo okazas, Roboto akiras datumojn de kontrol-aparato, spekulas faŭltajn partojn, kaj donas liston de altaj faŭltaj partoj siavice, montru la sekvencon de anstataŭigo kaj diagnozo de komponantoj en komputilo, kiuj povas esti rigardataj surloke per instrua pendado.Krome, la komputilo regule Akiru operaciajn datumojn de roboto, analizu la akiritajn datumojn, juĝu ĉu funkcia stato de roboto estas normala kaj instigas uzanton trakti venontan misfunkciadon.
Kontraŭ-kolizio-funkcio: kiam robota velda torĉo frakasas kun eksteraj objektoj, robota kontraŭ-kolizio aparato funkcias por protekti veldan torĉon kaj robotkorpon.
Faka datumbazo: fiksante necesajn veldajn kondiĉojn en programo, ĉi tiu sistemo povas aŭtomate kompletigi aranĝon de veldkudro kaj alĝustigo de respondaj veldaj parametroj.
Instruado kaj programado: realigi surlokan programadon per instrua pendado.
Weave veldado: dum velda procezo, Roboto ne nur povas realigi la komunan sving-veldan rondan tipon kaj Ankaŭ Z-tipo.Ĉi tio helpas roboton realigi la svingan veldan funkcion de kliento laŭ la formo de laborpeco, por pliigi la larĝon de veldkudro kun velda forto kaj bona velda agado.
Statusa ekrano: roboto povas montri funkciantan staton de tuta robota sistemo per instrua pendado, inkluzive de program-operacia stato, velda procezo-parametro-ŝanĝoj, sistemaj parametro-ŝanĝoj, aktuala pozicio de roboto, ekzekuthistoriaj rekordoj, sekurecaj signaloj, alarm-registroj, ktp., por ke klientoj povu. ĝustatempe komprenu la statuson de robotsistemo kaj antaŭzorgi problemojn.
Enigo / eligo dosieroj: robotaj sistemdosieroj kaj programdosieroj en la robotsistemo povas esti konservitaj en SD-karto ene de Robot-regilo, kaj ankaŭ povas esti konservitaj al ekstera ekipaĵo.Programoj verkitaj de eksterreta programa programaro ankaŭ povas esti ŝarĝitaj en Robot-regilon, Ĉi tio helpas klientojn sekurkopii sistemajn dosierojn regule, Post kiam estas problemo en la robota sistemo, Ĉi tiuj sekurkopioj povas esti restarigitaj por solvi problemojn de la roboto.
7, Enkonduko de Ekipaĵoj HY1006A-145 estas alt-efikeca roboto kun inteligenta funkcio.Ĝi taŭgas por gas-ŝirmita veldado kaj tranĉado-aplikoj.Ĝiaj trajtoj estas malpeza kaj kompakta strukturo.
Por arkaj veldaj aplikoj, Honyen sukcese desegnis malpezan kaj kompaktan brakon, kiu ne nur certigas originalan fidindecon, kaj ankaŭ realigas bonegan kostan rendimenton.
Honyen adoptas la plej altnivelan servoteknologion, kiu povas plibonigi moviĝrapidecon kaj precizecon de roboto, minimumigi la intervenon de operaciisto kaj plibonigi laboran efikecon por gasŝirmita veldo kaj tranĉado.
| Akso | Utila ŝarĝo | Ripeteblo | Potenca kapablo | Medio | Pezo | Instalado |
| 6 | 10 | 0.08 | 6.5KVA | 0~45℃20~80%RH (Neniu Humideco) | 300 kg | Grundo/Plafono |
| Movada Gamo J1 | J2 | J3 | J4 | J5 | J6 | IP-nivelo |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (pojno) |
| Maksimuma rapido J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/s | 145°/s | 140°/s | 217°/s | 172°/s | 500°/s |
Plena ĉina operacia interfaco kaj povas esti ŝanĝita en la anglan kun plena klavara operacio
Subtenu diversajn komunikadojn inkluzive de I/O-interfaco, Modbus, Ethernet ktp.
Subtenu ligojn kun pluraj robotoj kaj aliaj eksteraj ekipaĵoj
Grandgranda bunta tuŝekrano
Agordita kontraŭ-kolizio-aparato, protektanta robotbrakon kaj reduktas interferon
Robota Movada kontrolo disponigas optimuman padoplanadon
Centoj da enkonstruitaj funkcio-sakoj kaj funkcioj simpligas programadon
Per SD-karto, estas oportune konservi kaj kopii datumojn
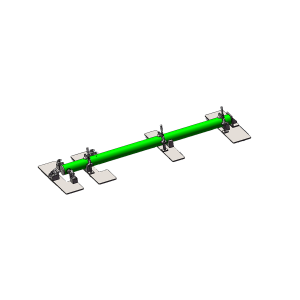
Poziciisto

Honyen Kap-vosta duobla subtena poziciilo, kiu estas uzata por turni laborpecon, kunlabori kun roboto, atingi bonan pozicion por veldado kaj atingi bonan veldan rendimenton.
Veldada Energiofonto

Megmeet Ehave cm 500h / 500 / 350 serio plena cifereca industria peza ŝarĝo * CO2 / MAG / MMA inteligenta velda maŝino
8. Instalado, Komisionado kaj Trejnado
Antaŭ livero, la robota sistemo estos kunvenita kaj plene funkcia provita en nia kompanio.Kliento liveros siajn partojn al nia kompanio por prova veldo kaj antaŭakcepto antaŭ livero.Dum antaŭakcepto, la telefonistoj de Kliento ricevos komencan teknikan trejnadon.
Instala plano kaj teknikaj postuloj estos prezentitaj al kliento 15 tagojn antaŭ instalado, kaj kliento devas fari ĝustatempajn preparojn laŭ postuloj.Nia kompanio sendos inĝenierojn por efektivigi sistemon-instaladon kaj komisiadon ĉe la retejo de la uzanto.Sub la kondiĉo, ke kliento certigas sufiĉajn komisiajn laborpecojn, la tempo de programado de komisiado, dungitaro trejnado ĝis amasa prova produktado ne devas superi 10 tagojn.Nia firmao trejnas uzantojn de robotsistemprogramado, operacio kaj prizorgado por klientoj, kaj praktikantoj devus havi la bazan scion de komputilo.
Dum instalado kaj komisiado, kliento devas provizi necesajn ilojn, kiel levi ekipaĵon, ĉarelon, kablojn, efikborilon ktp., kaj provizi provizoran helpon dum malŝarĝo kaj instalado.
Nia kompanio respondecas pri gvidado, instalado, ekipaĵo-komisio kaj trejnado de funkciigisto.Nia kompanio respondecas pri prizorgado kaj operacia trejnado.Operatoro funkciigos kaj prizorgos la ekipaĵon memstare.Trejnadenhavo: principo de strukturo de ekipaĵo, ofta elektra problemo, enkonduko al bazaj programaj instrukcioj, programaj kapabloj kaj programaj metodoj de tipaj partoj, enkonduko kaj antaŭzorgoj de ekipaĵa operacia panelo, ekipaĵa operacia praktiko ktp.
9. Kontrolo kaj akcepto
Antaŭakcepto estas efektivigita en nia firmao kun la partopreno de koncernaj laboristoj de ambaŭ partioj.Dum antaŭakcepto, laborpecoj devas esti provitaj laŭ precizeco de laborpeco provizita de kliento, Nur kvalifikita laborpeco devas esti veldita, kaj antaŭakcepta testa raporto estos elsendita.Post fina akcepto, Roboto estos liverita.Por certigi antaŭakcepton, 3 laborpecoj estos provizitaj por normala produktado.
10.Mediaj Postuloj Sekurecaj postuloj: gaso kaj rezervaj partoj uzataj de uzantoj devas plenumi koncernajn naciajn normojn.
Aerfonto devas esti metita ekstere, ne malpli ol 15 m for de fajro, kaj ne malpli ol 15 m for de gaso kaj oksigeno.Aerfonto devas konservi bonajn ventoligajn kondiĉojn kaj esti en malvarmeta loko for de vento.
Ĉiuj gascirkvitoj devas esti kontrolitaj antaŭ uzi roboton.Se estas aerfluo, ĝi devas esti riparita por certigi, ke ne estas eraro.
alĝustigante la premon kaj ŝanĝante gasan cilindron, funkciigisto ne devas havi oleajn substancojn sur siaj manoj.
ĉirkaŭa humideco: ĝenerale, la ĉirkaŭa humideco estas 20% ~ 75% RH (kaze de neniu kondensado);Mallongatempa (ene de 1 monato) malpli ol 95% RH (okazoj sen kondensado).
kunpremita aero: 4,5 ~ 6,0 kgf / cm2 (0,45-0,6mpa), filtrila oleo kaj akvo, ≥ 100L / min
Fundamento: minimuma betona forto estas C25, kaj la minimuma dikeco de fundamento estas 400 mm
vibrado: tenu for de vibrofonto
nutrado: nutrado de ĉiuj fabrikitaj elektraj kaj elektronikaj ekipaĵoj adoptas 50Hz (± 1) kaj 380V (± 10%) trifazan AC-tension por certigi primaran teron de nutrado.
Surlokaj servoj provizitaj de klientoj:
ĉiuj necesaj preparoj antaŭ livero, kiel fundamento, necesa velda laboro, fiksado de helpaj iloj ktp.
malŝarĝo kaj transportado ĉe la loko de la kliento.
11. Garantio kaj Postvenda servo La garantia periodo de velda energifonto estas 12 monatoj.
La garantia periodo de la robotkorpo estas 18 monatoj.
En kazo de fiasko aŭ damaĝo sub normala uzo kaj la ekipaĵo estas ene de garantia periodo, nia kompanio povas ripari aŭ anstataŭigi partojn senpage EXW (ekskludante konsumeblajn, bontenajn produktojn, sekurecajn tubojn, indikilojn kaj aliajn konsumeblajn speciale difinitajn de nia kompanio).
Por vundeblaj partoj sen garantio, nia kompanio promesas normalan servodaŭron kaj liverprezon de vundeblaj partoj, kaj ekipaĵo havas stabilan provizan kanalon de ekipaĵo ĝis kvin jaroj.
Ekstere de garantia periodo, nia kompanio daŭre liveros pagitan servon dumvive kaj provizos ampleksan teknikan subtenon kaj postulatajn ekipaĵojn.
12. Livero Alkroĉita Dokumentado Instalaj desegnoj: ekipaĵa fundamento-konstrudesegnaĵoj kaj ekipaĵaj instalaĵoj
◆ desegnaj desegnaĵoj: desegnoj de aparatoj kaj ekipaĵoj
◆ Manlibro: manlibro de operacio de ekipaĵo, manlibro pri bontenado kaj manlibro pri roboto
◆ akcesoraĵoj: liverolisto, atestilo kaj garantia karto.



