Enkonduko
La aŭtomobila industrio delonge estas pioniro en la adopto de pintnivelaj teknologioj por plibonigi efikecon, precizecon kaj skaleblecon. Inter ĝiaj plej gravaj komponantoj estas la veturilframo - la struktura spino, kiu certigas sekurecon, daŭripovon kaj rendimenton. Ĉar la postuloj pri malpezaj materialoj, adaptigo kaj rapida produktado pliiĝas, fabrikantoj pli kaj pli turnas sin al industriaj robotoj por revolucii la fabrikadon de framoj. Ĉi tiu artikolo esploras kiel robotiko transformas la produktadon de aŭtomobilaj framoj, de materiala manipulado ĝis veldado kaj kvalito-kontrolo, samtempe traktante defiojn kaj estontajn tendencojn en ĉi tiu dinamika sektoro.
Sekcio 1: La Kritika Rolo de Veturilaj Ĉasiloj en Aŭtomobila Dezajno
Veturilaj ĉasioj, ofte nomataj ĉasioj, servas kiel fundamento por ĉiuj aŭtomobilaj sistemoj. Ili devas elteni grandegan ŝarĝon, absorbi koliziajn efikojn, kaj subteni la pezon de la veturilo kaj ĝiaj pasaĝeroj. Modernaj ĉasioj estas konstruitaj uzante progresintajn materialojn kiel alt-forta ŝtalo, aluminiaj alojoj, kaj eĉ karbonfibraj kompozitoj por balanci forton kun pezredukto.
Tamen, la fabrikado de ĉi tiuj kompleksaj strukturoj postulas ekstreman precizecon. Eĉ malgrandaj devioj en velda vicigo aŭ komponenta kunmeto povas kompromiti sekurecon kaj rendimenton. Tradiciaj manaj procezoj luktas por plenumi la striktajn toleremojn postulitajn de la hodiaŭaj aŭtomobilaj normoj, kreante urĝan bezonon de aŭtomatigo.
Sekcio 2: Industriaj Robotoj en Kadrofabrikado: Ŝlosilaj Aplikoj
2.1 Materiala Manipulado kaj Komponanta Preparado
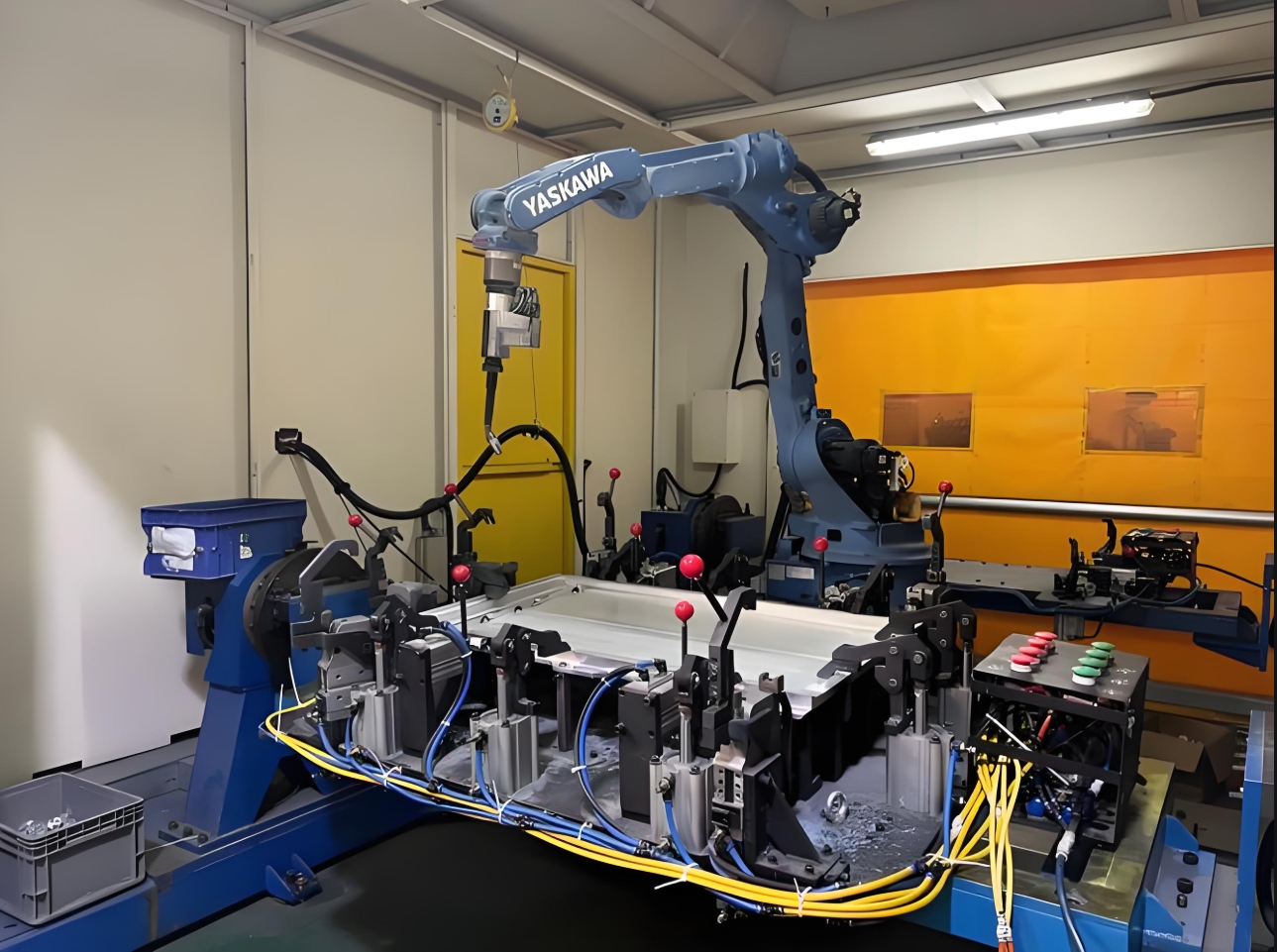
La produktado de aŭtomobilaj ĉasioj komenciĝas per la prilaborado de krudmaterialoj. Industriaj robotoj ekipitaj per progresintaj preniloj kaj vidsistemoj elstaras je manipulado de grandaj metalaj platoj, tuboj kaj prefabrikitaj komponantoj. Ekzemple:
- Manipulado de ladmetalaĵoRobotoj antaŭtranĉas kaj formas ŝtalajn aŭ aluminiajn platojn en framrelojn, transverstrabojn kaj krampojn kun submilimetra precizeco.
- Manipulado de kompozitaj materialojKunlaboraj robotoj (kunrobotoj) sekure manipulas malpezajn sed delikatajn materialojn kiel karbonfibron, reduktante malŝparon kaj homan eraron.
2.2 Veldado kaj Kunigado de Teknologioj
Veldado restas la plej robot-intensa etapo en kadrofabrikado. Modernaj robotaj veldsistemoj liveras senekzemplan konsistencon trans miloj da veldpunktoj:
- Rezista punkta veldadoPluraksaj robotoj plenumas altrapidan punktveldadon sur ŝtalaj kadroj, certigante unuforman artikforton.
- Lasera veldadoPrecizaj robotoj ekipitaj per laseraj kapoj kreas senjuntajn kunigojn por aluminiaj kadroj, minimumigante termikan distordon.
- Glua aplikoRobotoj aplikas strukturajn gluaĵojn laŭ kompleksaj ŝablonoj por kunligi hibridajn metal-kompozitajn kadrojn, procezo preskaŭ neeble reprodukta mane.
Kazesploro: Gvida eŭropa aŭtoproduktanto reduktis veldajn difektojn je 72% post deplojo de aro de 6-aksaj robotoj kun adaptiva vojkorekto, kapablaj alĝustigi veldparametrojn en reala tempo surbaze de sensora religo.
2.3 Asembleo kaj Integriĝo
La muntado de la framo implikas la integradon de pendomuntadoj, motorkrampoj kaj sekurecaj komponantoj. Dubrakaj robotoj imitas homan lertecon por fiksi riglilojn, instali ingojn kaj vicigi subasembleojn. Vizio-gviditaj sistemoj certigas, ke komponantoj estas poziciigitaj ene de ±0.1 mm tolerancoj, kio estas esenca por konservi la vicigon de la transmisio.
2.4 Kvalitkontrolo kaj Metrologio
Postprodukta inspektado estas esenca por plenumi sekurecajn regularojn. Robotaj sistemoj nun plenumas:
- 3D lasera skanadoRobotoj mapas tutajn framajn geometriojn por detekti misformiĝojn aŭ dimensiajn malprecizaĵojn.
- Ultrasona testadoAŭtomataj sondiloj inspektas la integrecon de veldsuturo sen difekti surfacojn.
- AI-funkciigita difektodetektoMaŝinlernadaj algoritmoj analizas fotilajn fluojn por identigi mikrofendetojn aŭ tegaĵajn faktkonfliktojn.

Sekcio 3: Avantaĝoj de Robota Aŭtomatigo en Kadroproduktado
3.1 Precizeco kaj Ripeteblo
Industriaj robotoj eliminas homan ŝanĝiĝemon. Ununura robota veldĉelo povas konservi ripeteblon de 0,02 mm tra 24/7 produktadcikloj, certigante ke ĉiu kadro plenumas precizajn dezajnajn specifojn.
3.2 Plibonigita Laboristsekureco
Per aŭtomatigado de danĝeraj taskoj kiel veldado super la kapo aŭ peza levado, fabrikantoj raportis 60%-an redukton de laborejaj vundoj rilataj al kadrofabrikado.
3.3 Kostefikeco
Kvankam komencaj investoj estas signifaj, robotoj reduktas longdaŭrajn kostojn per:
- 30–50% pli rapidaj ciklotempoj
- 20% malpli da materiala malŝparo
- 40% redukto de riparkostoj
3.4 Skalebleco kaj Fleksebleco
Modulaj robotĉeloj permesas al fabrikantoj rapide reagordi produktadliniojn por novaj framdezajnoj. Ekzemple, elektraj veturiloj (EV) kun bateriaj enfermaĵoj povas esti integritaj en ekzistantajn sistemojn kun minimuma malfunkcitempo.

Sekcio 4: Superante Defiojn en Robota Kadro-Fabrikado
4.1 Problemoj pri Materiala Kongrueco
La ŝanĝo al plurmaterialaj kadroj (ekz., ŝtal-aluminiaj hibridoj) postulas, ke robotoj pritraktu malsamajn kunigajn teknikojn. Solvoj inkluzivas:
- Hibridaj veldkapoj kombinantaj arkajn kaj laserajn teknologiojn
- Magnetaj preniloj por manipulado de neferaj metaloj
4.2 Programa Komplekseco
Programaro por eksterreta robotprogramado (OLP) nun permesas al inĝenieroj simuli kaj optimumigi robotajn laborfluojn ciferece, reduktante la komisiadtempon je ĝis 80%.
4.3 Cibersekurecaj Riskoj
Ĉar kadroproduktado fariĝas pli kaj pli konektita per Industria IoT, fabrikantoj devas efektivigi ĉifritajn komunikajn protokolojn kaj regulajn firmvarajn ĝisdatigojn por protekti robotajn retojn.
Sekcio 5: La Estonteco de Robota Kadro-Fabrikado
5.1 AI-Movita Adapta Fabrikado
Venontgeneraciaj robotoj utiligos artefaritan inteligentecon por:
- Mem-alĝustigu ilojn bazitajn sur materiala dikeco
- Antaŭdiri kaj kompensi ilo-eluziĝon
- Optimumigu energikonsumon dum pinta postulo
5.2 Kunlaboro inter homo kaj roboto
Kunrobotoj kun fort-limigitaj artikoj laboros kune kun teknikistoj por finaj framalĝustigoj, kombinante homan decidiĝon kun robota precizeco.
5.3 Daŭrigebla Produktado
Robotaj sistemoj ludos pivotan rolon en atingado de cirkla fabrikado:
- Aŭtomatigita malmuntado de fin-de-vivaj kadroj por reciklado
- Preciza materiala deponado por minimumigi la uzon de krudmaterialoj
Konkludo
La integrado de industriaj robotoj en aŭtomobilan ĉasioproduktadon reprezentas pli ol nur teknologian antaŭeniron — ĝi signifas fundamentan ŝanĝon en kiel veturiloj estas elpensitaj kaj konstruitaj. Liverante neegalan precizecon, efikecon kaj adaptiĝemon, robotaj sistemoj rajtigas fabrikantojn kontentigi evoluantajn postulojn por pli sekuraj, pli malpezaj kaj pli daŭrigeblaj veturiloj. Dum artefarita inteligenteco, progresintaj sensiloj kaj verdaj teknologioj daŭre maturiĝas, la sinergio inter robotiko kaj aŭtomobila inĝenierarto sendube pelos la industrion al senprecedencaj niveloj de novigado.
Por kompanioj specialiĝantaj pri industria robotiko, ĉi tiu transformo prezentas grandegajn ŝancojn kunlabori kun aŭtoproduktantoj por redifini la estontecon de movebleco — unu perfekte kreita ĉasio samtempe.
Vortkalkulo1,480
Ŝlosilaj TerminojAŭtomobila framrobotiko, robotaj veldsistemoj, AI en fabrikado, kunlaboraj robotoj, daŭripova produktado
SEO-RekomendojInkluzivi meta-priskribojn celantajn "aŭtomatan framaŭtomatigon" kaj "industriajn robotojn por aŭtoĉasioj". Uzu internajn ligilojn al rilataj kazesploroj aŭ produktaj paĝoj.
Afiŝtempo: 26-a de marto 2025



