Industria fabrikado estas grava ligo al la antaŭenigo de ekonomia kaj socia disvolviĝo. Nuntempe, la esplorado pri aŭtomataj veldaj ekipaĵoj profundiĝas kaj konkretiĝas, kio igas ilin vaste uzataj en la produktado de diversaj specoj de veldaj strukturoj.
En la procezo de aŭtomata veldado, inteligenta kaj cifereca racia kontrolo de la eraroj de interspacoj en la velda asembleo estas uzata ĝis ia grado, surbaze de tio, ankaŭ konsiderindaj faktoroj kiel la diferenco en la pozicio de la laborpeco, la devio de la junto de la laborpeco. Tial, lasera spurado de veldaj juntoj ludas gravan rolon en la velda procezo.
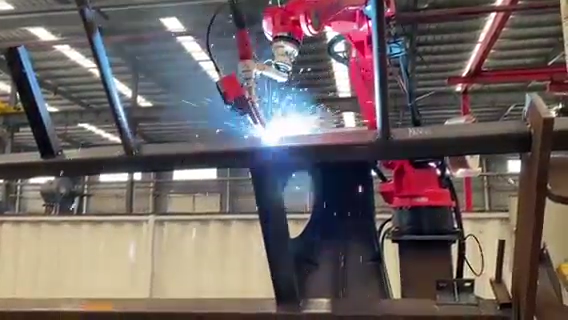
Veldado de la bazo de la cementa cisterna vagono, sep-aksa tera orbito, ok-aksa rotacio per lasera veldado
-La pozicio de la laborpeco multe varias
-Devio ekzistas ĉe la konekto de la laborpeco
-Alta velda precizeco estas necesa
-Malbona velda medio kaj fumo
En ĉi tiu kazo, la inteligenta roboto Yooheart HY1006A-145 estas uzata por veldado per lasera veldkudra spura sistemo, kiu havas altan flekseblecon, stabilecon kaj fidindecon.
Antaŭ ĉiu veldado, la ekipaĵo unue skanas kaj registras la koordinaton de la veldjunto per la lokalizado de la veldjunto, kaj poste kalkulas la koordinatan delokigon per la interna algoritmo kaj metas la referenckoordinatajn parametrojn en la faktan tempon por korekti la faktan devion ĝustatempe, por certigi la sigeladon kaj integrecon de la produkto post veldado.
Metodo de "kvarpunkta intersekco"
Kiel ĉiuj scias, du punktoj difinas rektan linion, sed la asembleo de la laborpeco formos la angulon. La konvencia algoritmo ne kapablas determini ĝian pozicion. Tio postulas uzi la metodon de "intersekco" je la kvara horo. La intersekco de du linioj produktas la intersekcpunkton. La speciala algoritmo kalkulas la pozicion de la intersekcpunkto per determinado de konataj koordinatoj de kvar punktoj, por atingi la veldan celon.

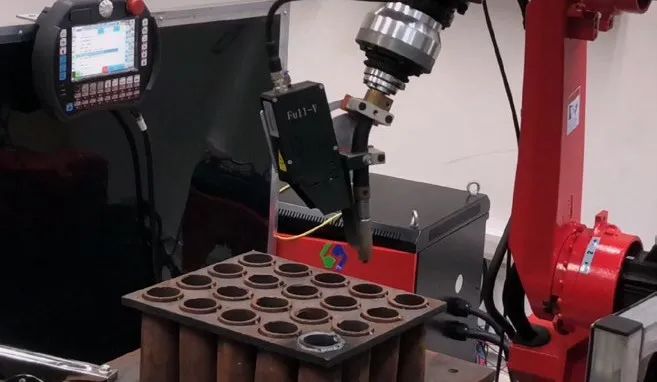
Lasera juntospura sistemo
La lasera sistemo por spurado de veldaj juntoj konsistas ĉefe el laseraj sensiloj kaj monitoradaj terminaloj. La lasera sensilo estas uzata por aktiva akiro kaj realtempa prilaborado de informoj pri veldaj juntoj, kaj subtenas realtempan komunikadon kun industriaj robotoj. Monitorada terminalo monitoras kaj agordas sensilojn. La sistemo ankaŭ havas la funkciojn de lokalizado, spurado kaj skanado antaŭ veldado por plenumi la bezonojn de inteligenta veldado.
Funkciprincipo: Skanado de veldsuturo, alĝustigo de punktonubaj bildoj, la algoritmo precize identigas la karakterizajn punktojn, kaj la realtempaj datumoj de kalkulrezultoj senditaj al la roboto, en kontrolinstrukciojn, modifas aŭ gvidas la robotoperacion.
Solvo de ondumita plato

Solvo por aŭtomata veldado de rondaj truoj

Solvo de cirkla junto

Tubplataj solvoj
Yunhua Intelligent povas provizi rapidan deplojon, sekurajn kaj efikajn aŭtomatigajn solvojn kaj realtempajn sistemajn solvojn. La lasera vida sistemo por spurado de veldjuntoj ebligas al la veldroboto realigi realtempan lokalizadon kaj spuradon de veldjuntoj, kaj korekti la veldadan trajektorion laŭ la delokigo de la veldjuntoj en la velda procezo, por realigi vere inteligentan veldadon.
Afiŝtempo: 9-a de aprilo 2022



