4-aksa stampa roboto por gazetara maŝino



Produkta Enkonduko
Konsiderante la efektivan postulon pri ĝisdatigo kaj transformado de la stampadindustrio, oni desegnis kaj evoluigis 4-aksan stampadroboton kun alta fleksebleco kaj simpla kontrolo.
Kvar-aksa stampa roboto adoptas kvar-aksan dezajnon, kompaktan formon, malgrandan grandecon, malpezan pezon, vaste uzata en argona arka veldado, paledigado, manipulado, stampado kaj aliaj kampoj, povas plenumi stabilan manipuladon, precizan veldadon. La kvar-aksa trumanipulilo povas plenumi stampadon flekseble en malgranda spaco, kaj ĝi estas simpla kaj oportuna por instali kaj sencimigi.
Kernaj Partoj
Ĉiuj altkvalitaj ĉinaj markaj partoj
Servomotoro
La marko de la servomotoro estas Ruking, ĉina marko kun la avantaĝoj de rapida reago, granda tordmomanto-inercia rilatumo de starta tordmomanto kaj tiel plu. Ĝi povas elteni severajn funkciajn kondiĉojn, kiuj efektivigas tre oftajn antaŭen kaj malantaŭen akcelajn kaj malakceliĝojn, kaj povas elteni plurfoje troŝarĝon en mallonga tempo.
LNC-KONTROLA SISTEMO
La roboto Yooheart uzas instruan programadon. Ĝi estas simpla, oportuna kaj fleksebla en funkciado. La roboto Yooheart ankaŭ subtenas foran programadon, kiu povas esti aplikata en diversaj kompleksaj programoj.
ROBOTA KORPO
La korpo adoptas la procezon de premgisado, uzante la muldilan kavaĵon por apliki altan premon al la fandanta metalformado, la korpo formanta altan densecon, fortan rigidecon, ĝia propra pezo estas pli malpeza.
Detala Montrado
Alta Precizeco
Rapida respondo
Kaj la nivelo estas gvida
en la lando
Simpla laŭ strukturo
Facile konservebla
Pli kostefika
Alta rapideco kaj stabileco
Preciza vojo
Perfektaj stampaj solvoj
Robota Parametro
| Projekto | Specifo | Projekto | Specifo | Akso | Moviĝa gamo | Maksimuma rapideco | Kava Dia |
| Akso | 4 | Temperaturo | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Kapacito | 3.7KVA | Humideco | 20-80% RH (Sen humideco) | J2 | +10º~+125º | 120º/s | —— |
| Pezo | 170 kg | Vibrado | Sub 4.9M/S² | J3 | +10º~-95º | 120º/s | —— |
| Maksimuma utila ŝarĝo | 10KG | Aliaj | Neniuj brulemaj kaj korodaj gasoj kaj likvaĵoj, tenu for de elektraj bruofontoj | J4 | ±360º | 200º/s | —— |
| Maksimuma laboramplekso | 140cm | Ripeteblo | ±0.08mm | IP-nivelo | IP65 | Instalaĵo | Grundo |
Robota Apliko
Ŝarĝado kaj malŝarĝado de varma eltruda produkto
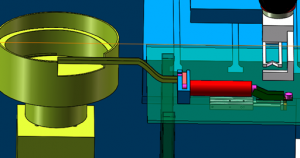
Ĉi tiu projekto celas ĉefe la formadon de kupra stampado. La ruĝa truadprocezo estas varma eltruda procezo. Dum la ruĝa truado, la metala materialo estas varmigita ĝis certa temperaturo kaj metita en antaŭvarmigitan muldilon. Post la unufoja tien-reen-movado de la premmaŝinilo, la metala materialo estas plaste deformita por atingi la bezonatan grandecon, formon kaj bonajn mekanikajn ecojn de la stampaj partoj. La kliento uzas la 4-aksan manipulan roboton Yooheart por ŝarĝi kaj malŝarĝi la ruĝan truadmetalan pecon.
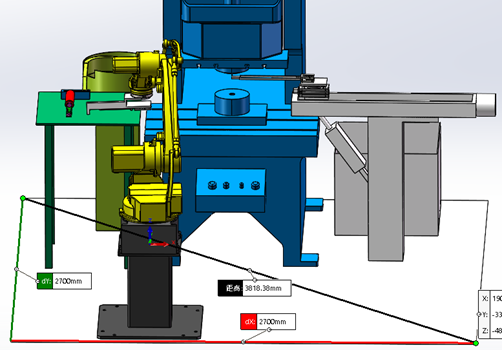
Superrigardo de la Integriĝa Solvo
La projekto konsistas el trupremilo, Yunhua 4-aksa 10kg roboto, duarangaj poziciigaj iloj, cilindra kombinita fortranĉilo kaj tiel plu. La konataj datumoj kiel tempobato, nominala ŝarĝo kaj laborkondiĉoj estas ĉiuj en la nominala parametrointervalo de HY1010B-140.


Superrigardo de la Produktada Procezo
Mana nutrado por ŝarĝolevilo▶ nutrado per vibroplato▶ Poziciigo de nutra aparato antaŭ varmigo▶ varmigo de kirloflua tubo▶ poziciigo de duaranga poziciiga fiksaĵo▶ robota fiksado▶ premado per stampilo▶ elŝutado de cilindra nutra aparato
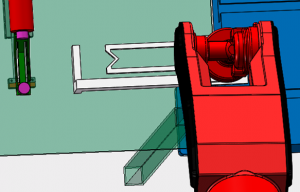
Resumo de la agado de la nutra kaj poziciiga aparato
Mane provizu la vibran platon ▶ La vibra plato estas la materialprovizo por la kirloflua hejtilo ▶ La dua poziciiga ilo estas la poziciiga robota krampo
Superrigardo de la ago de fiksilo
La roboto fiksos poziciigitan kupran materialon ▶ por stampilformado
Postvenda Servo
Ni havas perfektan postservan servon por helpi vin lerni la funkciadon eĉ se vi neniam uzis industriajn robotojn kaj solvi problemojn dum via uztempo.
Unue, ni provizos la rilatajn manlibrojn por helpi vin kompreni iujn informojn pri robotoj.
Due, ni provizos serion da instruaj filmetoj. Vi povas sekvi ĉi tiujn filmetojn paŝon post paŝo, de kabligo kaj simpla programado ĝis la kompletigo de kompleksaj programoj. Ĝi estas la plej efika maniero helpi vin dum la kovidaj cirkonstancoj.
Fine, sed ne malpli grave, ni provizos retan servon kun pli ol 20 teknikistoj. Se vi havas demandojn, vi povas kontakti nin iam ajn kaj ni helpos vin rapide.


Peto de peto
Ĉu ĉi tio estas sekura por laboristoj?
A. certe, unu el la avantaĝoj de uzado de roboto por prenado kaj lokigo estas protekti laboristojn kontraŭ vundoj. Unu laboristo povas pritrakti 5~6 unuojn da CNC-maŝino.
D. kian produkton oni povas uzi per ŝarĝa kaj malŝarĝa roboto?
A. Ĉiu robota maŝinŝargilo povas esti ekipita per taŭgaj fin-de-brakaj iloj, kiuj kongruas kun via maŝino kaj produkto. Ili estas ekstreme precizaj kaj ankaŭ havas la lertecon por manipuli la parton zorge.
D. Nur unu fino de la brako-iloj povas esti uzata por ŝarĝi kaj malŝarĝi roboton?
A. Industria robota brako povas modifi la programon kaj la prenilon, rapidaj ŝanĝoj en la inteligenta magazenado, sencimiga rapideco, forigante la bezonon de dungitoj sed ankaŭ de trejnadotempo, povas esti rapide metita en produktadon.
Ĉu ekzistas ia alia avantaĝo de ŝarĝi kaj malŝarĝi robotojn?
A. Plibonigu la kvaliton de la aspekto de la laborpeco: robotaj aŭtomatigitaj produktadlinioj, de nutrado, fiksado, tranĉado tute per robotoj, ĝis redukto de interaj ligiloj, la partkvalito estas multe plibonigita, precipe pli bela surfaco.
Q. Ĉu vi povas provizi plenajn solvojn por ŝarĝi kaj malŝarĝi robotojn?
A. certe, ni povas fari tion kune kun nia vendisto.